Differenciálgeometria (17)
Az Euler-Lagrange-féle
differenciálegyenletek
A felületi görbék görbületének további vizsgálatához a
sík egyenesinek analógiáját fogjuk megkeresni a felületeken. A sík két pontja
között a legrövidebb görbe az egyenes szakasz. Tegyük fel ezt a kérdést a
felületi görbékre vonatkozóan is. Azaz: egy adott felület két pontja között
vajon melyik a legrövidebb felületi görbe? Nyilvánvaló, hogy a következő
integrál minimumát kellene meghatározni, ahol az ismeretlen az u(t) felületi görbe.
Olyan függvényeket, amelyek függvényeken vannak
értelmezve funkcionáloknak
nevezzük. Ezek alapján ez az integrál egy funkcionál. A matematikának azt az
ágát, amely funkcionálok (vagy éppen az ilyen integrálok) szélsőértékét-számításával
foglalkozik, variációszámításnak
nevezzük. Most tehát következzen egy kis variációszámítás.
Jelölje az ![]() a tér egy függvényét,
az
a tér egy függvényét,
az ![]() pedig a deriváltját.
Legyen adva egy
pedig a deriváltját.
Legyen adva egy![]() hatváltozós, kétszer folytonosan deriválható függvény,
továbbá legyen x1
és x2 két vektor. Keressük
az x(t1) = x1
és x(t2) = x2
peremfeltételeket kielégítő x = x(t)
görbéket, amelyek az
hatváltozós, kétszer folytonosan deriválható függvény,
továbbá legyen x1
és x2 két vektor. Keressük
az x(t1) = x1
és x(t2) = x2
peremfeltételeket kielégítő x = x(t)
görbéket, amelyek az
integrál
szélsőértékeit adják. Egyáltalán nem biztos, hogy létezik a szélsőértéket
megadó görbe. Ha az integrál ívhosszat határoz meg, akkor például nincs
maximumot adó görbe. Ha létezik szélsőértéket megadó görbe, akkor pedig nem
biztos, hogy az egyértelmű. Mert például a gömb felületén, annak két átellenes
pontja között, minden e két ponton átmenő főkör minimális ívhosszat ad meg. A
szélsőérték létezésének szükséges feltétele:
amely egy
közönséges, másodrendű differenciálegyenlet-rendszer. Ezeket
az egyenleteket a variációszámítás Euler-Lagrange-féle
differenciálegyenleteinek, a benne szerepfő F függvényt alapfüggvénynek
(esetleg alkotófüggvénynek)
nevezzük. Az Euler-Lagrange-féle differenciálegyenlet
megoldásai a stacionárius görbék.
Ehhez a feltételi differenciálegyenlet-rendszerhez úgy juthatunk, hogy az ![]() megoldásgörbét egy, a
fenti peremfeltételeket (a(t1)
= 0 és a(t2) = 0)
kielégítő görbesereg elemeként írjuk fel:
megoldásgörbét egy, a
fenti peremfeltételeket (a(t1)
= 0 és a(t2) = 0)
kielégítő görbesereg elemeként írjuk fel:
![]()
ahol
a második tag az ![]() függvény variációját jelenti. A görbesereg
elemei (elég kicsiny
függvény variációját jelenti. A görbesereg
elemei (elég kicsiny![]() esetén) az
esetén) az ![]() környezetében
helyezkednek el. A differenciálegyenletet kielégítő függvénynél ez a variáció
eltűnik (mint a függvények szélsőértékénél, ahol a szükséges feltétel az első
derivált eltűnése). Innen kapta a matematika ezen ága a variációszámítás elnevezést.
környezetében
helyezkednek el. A differenciálegyenletet kielégítő függvénynél ez a variáció
eltűnik (mint a függvények szélsőértékénél, ahol a szükséges feltétel az első
derivált eltűnése). Innen kapta a matematika ezen ága a variációszámítás elnevezést.
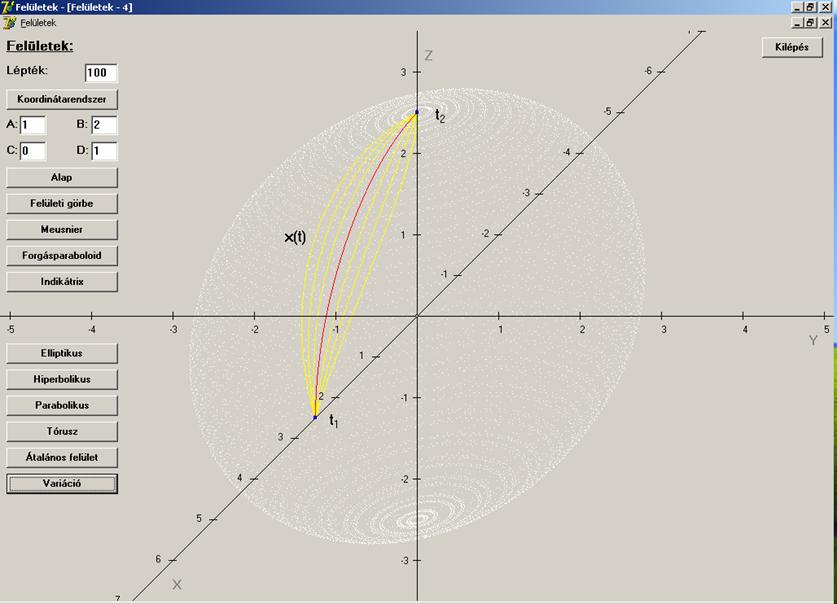
A következő ábrán a fentebbi görbesereg néhány elemét
ábrázoltuk. Mindegyik eleme átmegy a peremfeltételi pontokon. A stacionárius
görbe piros színű, a többit sárgával rajzoltuk. (Az egyszerűség kedvéért a
görbék egy gömbfelületen vannak ábrázolva. Mivel csak a szemléltetés volt a
cél, így ez az általánosság rovására nem ment, hiszen ez hasonlóan nézne ki
bármely felület elég kicsiny darabján.)
Nézzük tehát, hogyan kaphatjuk meg a fenti, Euler-Lagrange-féle differenciálegyenleteket. Az integrálok
értéke a fenti görbeseregre az ![]() függvénye:
függvénye:
Ennek
az ![]() helyen szélsőértéke
van:
helyen szélsőértéke
van:
![]()
Vegyük
az I ![]() szerinti deriváltját:
szerinti deriváltját:
Ebben
a kifejezésben:
Így:
Parciálisan
integrálva a második tagot:
Mivel
a(t1) = a(t2) =
0, így rendezés után ezt kapjuk:
Ez
viszont csak úgy lehetséges, ha:
Ami
nem más, mint a fentebbi Euler-Lagrange-féle
differenciálegyenletek.
Említsünk meg itt néhány klasszikus variációszámítási
feladatot, illetve problémát.
1. Két pont között legrövidebb
görbe: Legyen adva a síkon két pont: P1(x1,
y1) és P2(x2,
y2), ahol x1<x2.
Tekintsük azokat a folytonosan deriválható y
= y(x) függvényeket, amelyek görbéi e két pontra
illeszkednek. Melyik görbe ívhossza a legkisebb. A pontokat összekötő görbe
ívhossza nyilván:
Elemi
geometriából jól tudjuk, hogy ennek a feladatnak a megoldása a két pontot
összekötő egyenes. Ennek egyenlete pedig:
2. Brachisztochron-probléma: adva van a gravitációs térben két, nem azonos
magasságban és nem egy függőleges egyenesre eső P1(x1, y1) és P2(x2, y2)
pont, ahol x1< x2
és y1> y2.
A nehézségi erő hatására mozgó anyagi pont a felső pontból az alsóba egy y = y(x) görbe
mentén mozog, amely kényszerként hat a pontra és y(x1) = y1, valamint y(x2) = y2. Határozzuk meg a görbét úgy, hogy
a mozgás a lehető legrövidebb idő alatt történjen meg. A sebességet a v = ds/dt derivált adja. Ebből dt = ds/v. A pályán való mozgás ideje
tehát:
Az
energia megmaradás törvénye szerint (a mozgási energia növekedése egyenlő a
gravitációs energia csökkenésével, v1
a kezdősebesség a P1
pontban és g a gravitációs
gyorsulás):
Ebből:
Így
a pálya befutásához szükséges idő:
A brachisztrochon-probléma megoldása a ciklois,
melynek paraméteres egyenletrendszere (a a peremfeltételekből
meghatározandó álladó):
Határozzuk
meg azt a görbét, amelyre a keletkezett forgásfelület felülete a legkisebb
lesz. Ennek a problémának a megoldása a koszinusz hiperbolikus függvény:
Itt
az a és b a peremfeltételekből meghatározandó
állandók.
A geodetikus vonal
A felületi görbék ívhosszának variációjánál a
stacionárius görbéket geodetikus vonalaknak
nevezzük. A feladatunk az lesz, hogy írjuk fel a geodetikus vonalak egyenletét
ívhossz-paraméterben. Azaz legyen az Euler-Lagrange-féle
differenciálegyenlet-rendszer alapfüggvénye:

A Euler-Lagrange-féle differenciálegyenlet-rendszer:

Számítsuk
ki a jobboldali részeket az F
alapfüggvényt segítségével. Az első deriváltak:

A
második deriváltak:


Ezek
alapján az Euler-Lagrange-féle differenciálegyenlet-rendszer:

Mivel
az
elsőfajú Christoffel-féle szimbólumok segítségével az
egyenletrendszer ilyen alakú:

Vagyis:
Most
tekintsük az ívhosszat paraméternek, azaz:
Így
a geodetikus vonal egyenlete ívhossz-paraméterben:
Most nézzünk néhány tulajdonságát a geodetikus
vonalaknak.
Először is a geodetikus vonal egyenlete egy másodrendű
differenciálegyenlet-rendszer. A peremfeltételekben azt adjuk meg, hogy mely
pontból és milyen irányba induljon ki a geodetikus vonal. Ez az
egyenletrendszer mindig egyetlen görbét ad megoldásul, azaz a felület minden
pontjából, minden irányba egyetlen geodetikus indul ki.
Másodszor: két felületi pontot összekötő legrövidebb felületi
görbe mindig geodetikus. Ugyanakkor ez fordítva nem feltétlen igaz. Például a
henger felületén, ha a két pont nem azonos magasságban van, akkor köztük
végtelen sok geodetikus húzható (ezek a hengeres csavarvonalak), de ebből csak
egy a legrövidebb.
Harmadszor: sík esetén a másodfajú Christoffel-féle
szimbólumok értékei nullák, így a differenciálegyenlet-rendszer megoldásgörbéi
egyenesek, vagyis a sík geodetikus vonalai egyenesek. A gömb geodetikus vonalai
pedig a kiválasztott pontra illeszkedő főkörök.
Negyedszer: ha a felületre egy egyenes illeszkedik, akkor az természetes módon geodetikus. Ugyanis nemcsak felületi,
de minden térbeli görbe között is ez a legrövidebb. Egyébként egy nem egyenes
felületi görbe akkor és csak akkor geodetikus, ha a felületi normálisnak és a
görbe főnormálisának iránya megegyezik. Ugyanezt
másképp fogalmazva: a geodetikus simulósíkja a felület normálsíkja, vagy a
rektifikáló síkja a felület érintősíkja.
Ötödször: Newton első törvénye szerint egy anyagi pont erőhatás
hiányában egyenes pályán (és egyenletesen) mozog. Ha az anyagi pont mozgását
olyan erő határozza meg, amelyet egy felület fejt ki kényszerként (súrlódás
nélkül), akkor az anyagi pont a felület geodetikus vonalai mentén fog mozogni.
A kényszererő ugyanis mindig merőleges a felületre, Newton második törvénye
szerint a tömegpont gyorsulása is ilyen irányú (azaz a kinetikus energiáját nem
tudja megváltoztatni, vagyis a sebessége állandó). Ha tehát a felület egy sík,
akkor egyenes pályán (geodetikus mentén), egyéb felület esetén szintén
geodetikus mentén mozog, hiszen a gyorsulása, azaz a pályájának a főnormálisa merőleges a felületre, vagyis párhuzamos a
felület normálisával.
Geodetikus görbület
A következőkben a felületi görbék újabb, de talán a
legfontosabb görbületét fogjuk definiálni. Egy
![]()
felületi
görbe P0 pontbeli
geodetikus görbületén annak az x*
görbe görbületét értjük, amelyet úgy kapunk, hogy a görbét merőlegesen
levetítjük a felület P0 -beli érintősíkjára. Ennek a geodetikus görbületnek a
nagysága:
A
geodetikus görbületet pozitív vagy negatív előjellel láthatjuk el attól
függően, hogy a felületi normális végpontjából nézve az érintővektor pozitív,
illetve negatív forgással vihető át a vetületi görbe főnormális
vektorába. A geodetikus görbület a pontbeli érintővektor, annak deriváltja és a
felület normálisával ís felírható
(vegyes-szorzatként):
![]()
A
geodetikus görbület nem más, mint a felületi görbének az őt érintő geodetikus
vonalhoz viszonyított görbülete. Ebből az adódik, hogy egy felületi görbe akkor
és csak akkor geodetikus vonal, ha geodetikus görbülte eltűnik. Mivel a
geodetikus görbület csak a felület alapmennyiségeinek függvénye, így csak a
felület belső geometriájától függ. Ennek az a következménye, hogy a geodetikus
vonal a hajlítással szemben invariáns. Hajlítással kaphatunk például síkból
hengert vagy kúpot. A hajlítással szembeni invariáns tulajdonságok vizsgálata a
felület belső geometriáját jelenti. Ez vezet például a Riemann
geometriához, amellyel ez a cikksorozat már nem foglalkozik.
Következő
lap: http://gorbem.hu/MT/DiffGeom18.htm